小さくて賢いユニークな探査ロボ、ミネルバⅡ1
世界初の偉業を成し遂げ、驚くような画像を送ってきたミネルバⅡ1とはどんなローバーなのか?
ローバー1Aと1Bの2つの探査ロボからなり、いずれも直径18cm、高さ7㎝の正十六角柱。重さは約1kg。1Aには4台、1Bには3台のカメラが搭載され、リュウグウ表面のステレオ画像を撮影予定。光センサー、加速度計、温度計、ジャイロを搭載している。
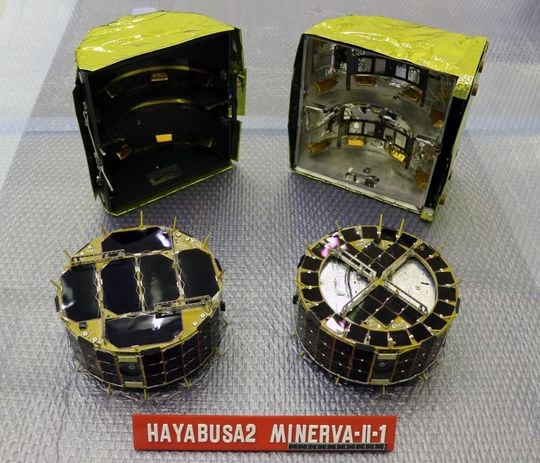 ミネルバⅡ1は2つのローバーからなる。カメラの台数や熱の放出の仕方などが若干異なる。(提供:JAXA)
ミネルバⅡ1は2つのローバーからなる。カメラの台数や熱の放出の仕方などが若干異なる。(提供:JAXA)
ユニークなのはその移動方法だ。前述のとおり、重力の小さな小惑星上では車輪を使えば浮かび上がってしまう。「それなら積極的に浮いてしまえ!」という逆転の発想で、ホッピング機構を搭載した。内蔵するモーターを回転させると反動で機体がホップ、つまり飛び跳ねる。1回のホップで最大15分ほど滞空し、水平方向に約15m移動する。飛び跳ねるロボットとは、超ユニークだ。
太陽電池で電力を貯めて、たまったらモーターを回す。重力がないのでふわっと浮き上がる。最大15m飛んで着地後に転がる。そして着地後は、写真を撮ったり温度を測る仕事がある。いつ写真を撮るか、そのタイミングもローバー自身が考えている。電力や温度環境を考えて何枚撮影するか、あらかじめプログラムされているのだ。遠くに飛ぶときはたくさんの枚数を撮影するし、メモリが限られているときは枚数を制限する。
懸念されるのは、凸凹が多いリュウグウ表面でホップを繰り返すうちに、太陽電池に傷がついていくこと。徐々に電力が落ちていくと考えられる。ミネルバⅡ1は電力がある限り飛び続ける。
はやぶさ2プロジェクトミッションマネジャー吉川真准教授は「ミネルバはリュウグウ表面に降りた状態で写真を撮れる。石やレゴリスの様子がより正確に分かると期待している」。10月末の「はやぶさ2」タッチダウンを前に、その科学的価値に大きな期待を寄せる。