探査機がすべて自分で判断するのは高度500mから
はやぶさ2は、いくつかの段階で「GO/NoGO判断」を行う。チームが「最も大きい判断」と位置付けるのは22日朝6時2分に到達予定の、高度500mの地点だ。
ここまでは地上からはやぶさ2をコントロールすることが可能だが、ここで「GO」の判断を出せば、その先は着陸、弾丸発射、浮上をはやぶさ2自身が自律的に判断して実行することになる。(厳密には、高度400ⅿ地点のデータを見て速度を変えるなど、最終調整をする可能性はある)
最も緊張が強いられるのは、高度45mからの低高度の段階。ここからは4カ所のチェックポイントがある。
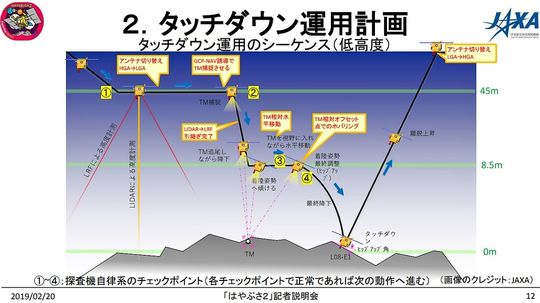
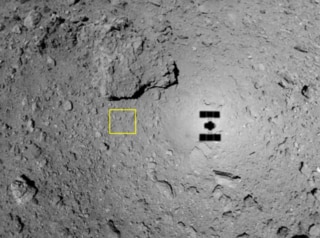
(1)高度45mで、探査機のカメラがターゲットマーカーを捉える。捉えられなければアボート。
(2)ターゲットマーカーをカメラ中心に見据えた状態を維持しながら、高度8.5mまで降下する。
(3)高度8.5mに到達したら、探査機の姿勢を着陸場所の形状に合わせて傾ける(着陸地は尾根で傾斜があるため)。その姿勢でターゲットマーカーを見ながら、着陸地点に向けて約3m水平移動させる。水平移動中、表面の凸凹を確認。もし想定外の凸凹があった場合にはアボート。
(4)姿勢の安定など探査機の状態を確認後、スラスターを噴いて自由落下。探査機が地表に接地したことが確認されると弾丸を発射、サンプルを採取して浮上する。着陸は数秒間。