MiG-31の一瞬の隙を突いた攻撃
では、今回のケースでは、ウクライナはどのようにしてキンジャール搭載のMiG-31を破壊できたのか。
MiG-31を飛行場で破壊したことに関しては、ベルベック飛行場のコンクリートのハンガー(格納庫)から出てきたところを狙ったのか、あるいは、ウクライナから攻撃の可能性が低いロシア領土内から飛行してきたところを狙ったのか、正確なところは不明だ。
だが、おそらくウクライナ国境から遠く離れた他の飛行場から飛来してきてベルベック飛行場に着陸し、そこでキンジャールを搭載して離陸する予定だったのではないかと考えられる。
その理由は、以下の通りである。
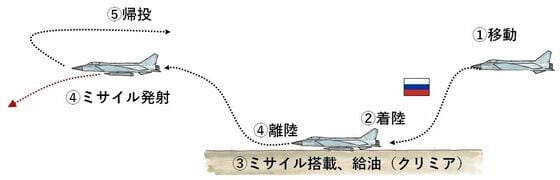
①ロシアがウクライナのミサイルやドローン攻撃を避けるために、戦闘機を国境から離れた空軍基地に移動していた。
②重い弾道ミサイルを搭載し、ミサイルを発射して帰投するまでの燃料を補給するために中継地点のベルベック飛行場に飛来した。
そして、MiG-31は、着陸からミサイル搭載、離陸までに必要な数時間以内という一瞬の隙を突いて攻撃されたようだ。
図 MiG-31の移動・着陸・離陸の動き(イメージ)
一瞬の隙を突く作戦を可能にしたもの
ウクライナは一瞬の隙を突いた攻撃を可能にした。そのためには、次の3つの条件が必要である。
①クリミア半島全土の軍事関連施設や兵器の動向をリアルタイムで知ること。
②一瞬の隙を見つけた瞬間(短時間)に攻撃できる手段を持つこと。
③攻撃を防ぐ防空システムが破壊されていること。
軍用機の動きをリアルタイムで掴むためには、通信電波情報とエリント情報を入手する方法がある。両方を同時に入手できれば、その情報はほぼ間違いなく正確だ。
エリント情報は、エリント衛星やエリント収集機で収集できる。軍用機からレーダーの電子情報が出されれば、その情報を入手し、機種とその位置(移動状況でも)を刻々と捉えることができる。
図 ウクライナ電子情報収集(イメージ)
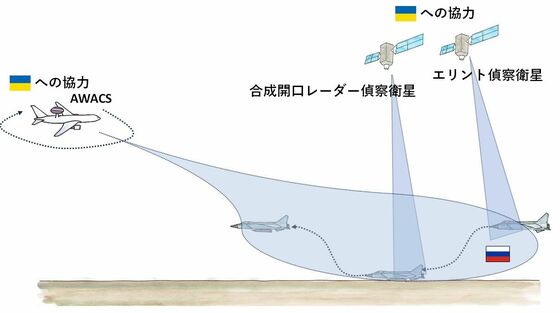
映像の偵察衛星情報は、撮影したその瞬間の情報である。そのため、その後の行動を予測できない欠点があり、その情報を使って直ちに攻撃に移行するのは難しい。
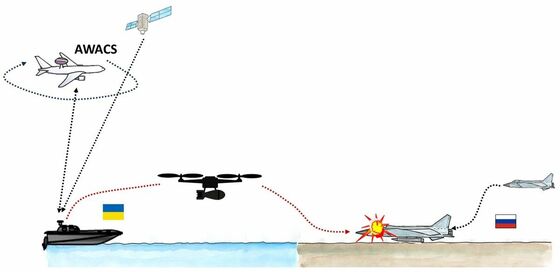
また、大型のFPV(一人称視点)ドローンで攻撃するには、ウクライナの領土から数百キロ離れていれば、発進して目標に到達するのに数時間必要になる。
そのため、クリミアの動く目標が停止している短い時間にそれを破壊するには、目標に近い位置から攻撃する必要がある。
図 海上からのドローン攻撃(イメージ)
具体的にはどう攻撃したのか。
ウクライナは、クリミアの攻撃目標の近くの海上にドローン搭載の無人艇を待機させて、そこからドローンを発進させて攻撃したのではないかと考えた(図)。
加えて、ドローンが破壊されずに目標に突入するためには、防空兵器のシステムが破壊されていることが必要であり、防空兵器そのものの性能が米欧の兵器に比べて、かなり悪いことからできることでもあった。
ロシアの防空兵器がことごとく破壊されていることについては、JBpress『巡航ミサイルによる攻撃を防げないロシア防空網はすでに壊滅状態』(2025.11.23)に述べている通りである。










