これからの社会で普及していくサービスロボット
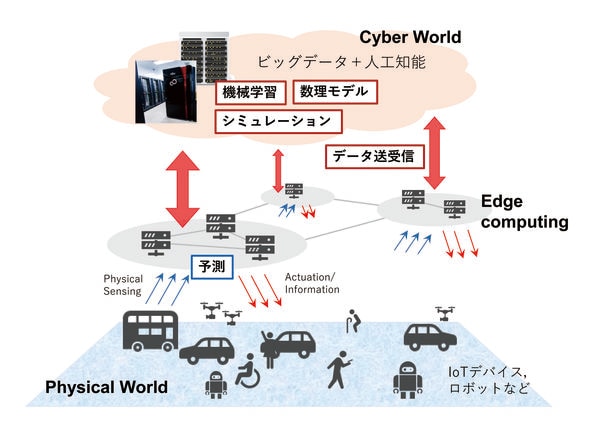
日本政府がめざす近未来の社会「Society 5.0」は、サイバー世界(Cyber World)と現実世界(Physical World)が融合する社会だ。ドローンやスマート家電、自動運転や遠隔医療など、あらゆるモノとコンピュータがつながり、日常生活におけるロボットとの関わりも増えると言われている。
 現代教養学部 数理科学科 情報理学専攻 教授
現代教養学部 数理科学科 情報理学専攻 教授加藤 由花 氏
そんな人間とロボットの共存に関する研究に取り組んでいるのが、東京女子大学 現代教養学部 数理科学科情報理学専攻の加藤由花教授だ。加藤教授は、「人・ロボット共存社会の実現」をテーマに、情報科学・数理科学をロボティクスに応用し、ロボットが人間社会と共存するために必要な様々な手法や仕組みについて研究している。具体的には、ロボットが自分で自律的に周囲の環境を認識し、安全で効率的に人間の作業を支援/代替するためのソフトウェアについて研究し、ロボットの身体や動作機構を実現するためのハードウェアについては、他大学の専門家と協力しながら取り組みを進めているという。
加藤教授はロボットを「知的な機械の総称」と定義する。一口にロボットといっても、工場などで使われる産業用ロボットやAIを搭載したスマートロボットなど種類はさまざまだ。そのなかでも、加藤教授が研究対象にしているのは、サービスロボットと呼ばれる種類のものだ。特に物理的な身体を持つロボットが対象で、たとえば、案内ロボットや電動カートなど、“人と共に動く”、“人に寄り添う”、“人とコミュニケーションをする”といった動きを伴うロボットである。これらのロボットは、運搬、介助など多くのサービスへ展開が期待されるため、これからの社会で最も普及するロボットだと言われている。研究分野としても注目度が高まっている分野だ。
加藤教授は人間とロボットの共存について、「サービスロボットが人間とともに生活するためには、自分自身で周囲の環境を認識し、同じ空間に存在する人間の状態を理解しなければなりません。そのための数理モデルやアルゴリズムを考えたり、どのようにソフトウェアとして実現していくのかを考えるのが研究の大きなテーマです」と語る。
ロボットの研究では、どんなハードウェアを作るかに注目が集まることが多い。しかし、人間と共存するロボットでは、どうやってロボットを動かすかというプログラム、つまりソフトウェアに関する研究の重要度がどんどん大きくなっている。情報科学・数理科学の出番である。現在、ネットワークやインフラ環境の整備、コンピュータ性能の向上などを背景に、サイバー世界には大量のテキスト・画像・IoTデータなどがビッグデータとして蓄積され、それらのデータを分析するAI技術や、そのベースとなる様々な理論がものすごい勢いで進化している。当然、これらの技術や理論を、現実世界に存在するロボットにも使いたくなる。サイバー世界と現実世界が融合した社会では、身体を持った人工知能としてのロボットが現実のものになる。これがロボット研究の進展の背景にある。
人間と共存するロボットは不確かな環境で動く
加藤教授は、ロボットが認識すべき周辺環境の一つとして、経路予測と呼ばれる領域からサービスロボットの研究にアプローチしている。これは、歩行者などの移動物体が、今から先どのような軌跡で移動するのかを予測する研究で、ロボットの他、自動運転や監視カメラの画像解析などへの応用が期待される。人間は、人混みの中でも、相手の未来の動きをある程度予測することで、お互いの衝突を回避している。ロボットにも、同じような予測能力をプログラムとして与えることができれば、人間との衝突を回避したり、先回りしたサービスを提供できるようになる、という発想だ。予測には、確率論を用いた数理モデルや、機械学習のアルゴリズムなどを用いる。


「自動車工場などで使われる産業用ロボットは、ものすごく細かい作業も確実にこなす、高性能・高機能なロボットです。これを実現できているのは、環境が統制されていて、用途が決まっているからです。家の中や公共施設など、様々な環境で使われるサービスロボットではそうはいきません。人が突然飛び出してきたり、障害物が出現したり、不確実な環境への対応が必要です。先回りや予測が大きな意味を持つのです」と加藤教授は説明する。
加藤教授は、実際に予測手法を用いた実証研究も行った。老人福祉施設の受付にロボットを設置し、高齢者と若年者を識別することでロボットの応答を変えるシステムを実装。識別の手法としては、レーザーセンサーで歩行者の歩き方を測定し、歩く速度のばらつき具合を事前にプログラムに学習させておくことで、高齢者と若年者を見分けた。一般的には、ロボットにカメラを取り付け、画像認識で高齢者と若年者を識別する方が簡単だと思われがちだが、そこにはプライバシーの問題も発生する。そのため、レーザーセンサーを用いた識別手法を採用したという。
続いて、加藤教授が取り組んだ研究は、博物館の受付にロボットを設置し、入口への入り方から来場者の分岐方向を予測して、来場者への挨拶内容を変えるというものだ。人の流れから、左側の事務室に進む人と右側の博物館に進む人を予測して、博物館に進む人にだけ挨拶を行う。そのほか、人に付いて移動する追従ロボットの研究も実施。人に追従しながら、重い荷物を運んだり、案内してくれたりするロボットであるが、障害物が経路を遮ると、前を行く人間を見失ってしまう。経路予測の技術を用いると、未来の経路を予測し、フォローし直すことができる。
人間の能力を超えるロボットの開発がゴールではない
このようにサービスロボットのソフトウェアの研究を進める加藤教授であるが、一方で社会実装に向けては課題も多いという。
一つは、個人のプライバシーに関する問題だ。人間とロボットが共存していくためには、人間の置かれた状態や周辺環境を把握するためにセンシングを行い、大量のデータを集める必要がある。しかし、これにはデータを収集される側の人間の同意が必要である。加藤教授は、この点を考慮して、自身の研究ではカメラを活用した画像認識によるデータ収集以外の手法も取り入れている。今後、ロボットが人間社会に浸透していくうえでデータ収集に関する議論はさらに活発になるだろう。

もう一つの問題は、責任の所在だ。ロボットが上手く動かない時、物を破損したり、人に危害がおよんだ時など、誰が責任を取るのか。また未然にトラブルを防ぐためには、どのような規制が必要か。「ロボットを人間社会に実装するためには、技術だけでは解決できない問題が山積している」と加藤教授は指摘する。
さらには、サービスロボットが生活空間に普及することで、人間そのものの存在がどうなるのかといった漠然とした不安もつきまとう。加藤教授はこれについて、「そもそも人間の能力を超えるサービスロボットの開発をめざしているわけではありません。ロボットも人間と同じように判断して対応できる、そんな人間とロボットが共存する社会の実現をめざしています」と語る。
人間とロボットの違いは何か。人間はどのような点が優れているのか。ロボットの研究から見えてきたのは、「無」からモノを作り出すことができる人間の凄さだと加藤教授はいう。ロボットが人間と同じように環境を認識し共存するために必要な技術とは。加藤教授の挑戦は続く。
■特集トップページはこちら>>
<PR>