かつて夢の世界だった自動運転は、すでに現実となりつつある。自動運転レベル2の機能は多くの量産車への標準搭載や義務化が進み、レベル3の車両も市場投入された。限定的な条件付きながらも自動運転が実用化され、より安全で快適な交通社会の実現に欠かせないものとなっている。しかし、完全な自動運転の実現には乗り越えなければならない課題が山積している。自動運転の難しさはどこにあり、何が実現の鍵となっているのだろうか。
システムの主体化によりメーカーの責任範囲が拡大
自動運転の研究開発は1980年代後半から始まった。センサーやコントローラの進化によって、一定の車間距離・速度で走行するアダプティブクルーズコントロールや車線維持、衝突軽減ブレーキなどが開発・実用化されてきた。自動車の運転は便利で快適になり、安全性も高まった。今や自動車は“走るコンピュータ”とも呼ばれ、自動運転の世界はもう絵空事ではなくなっている。
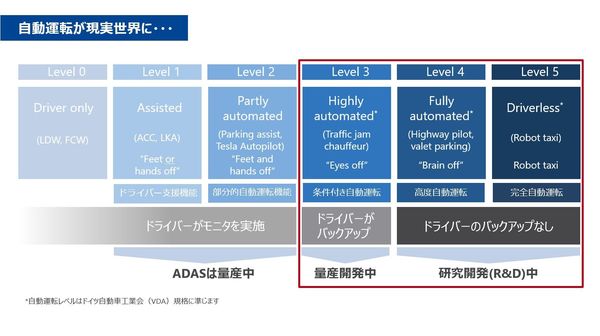
これまでは、各国の自動車工業会が策定した5段階の自動運転レベルのうちレベル2に留まっていた。レベル1からレベル2は先進運転支援システム(Advanced Driver-Assistance System, ADAS)と呼ばれる機能で、ドライバーの運転をシステムが部分的にバックアップする。しかし、その先のレベル3以降の自動運転(Autonomous Driving, AD)と呼ばれる機能は、システムが主体となり、ドライバーはバックアップの役割になる。
「運転支援ではシステムの機能の責任が限定的で、ドライバーの責任とされる範囲も多く残っています。しかし、自動運転の世界では今までドライバーの責任範囲だった機能も自動車を提供する側の責任となり、自動車やアプリケーションを開発するメーカーの責任範囲が一気に広がります」と話すのは、自動車開発のシミュレーションツールと検証ツールのトップベンダーであるdSPACE Japan株式会社のソリューション技術部部長の宇野重雄氏だ。
自動運転を実現するためには、多くの機能が必要になる。レーダーやカメラ、LiDARといったたくさんのセンサーを搭載し、それらのデータから周辺状況を即座に分析・判断して、適切な運転操作を自動で行うためのコンピュータやAIが装備されていなければならない。
ただ、あらゆる機能を装備したとしても自動運転の実現はとてつもなくハードルが高い。宇野氏は「安全性を確保するためには、あらゆる条件でのテストが必要になるからです」と指摘する。
 dSPACE Japan株式会社 ソリューション技術部 部長 宇野重雄氏
dSPACE Japan株式会社 ソリューション技術部 部長 宇野重雄氏
あらゆる場面を想定したテストの実行が必要に
例えば、前方の車に追従して走行するアダプティブクルーズコントロールは、人間が主体で運転する場合の便利な運転支援機能として既に実用化されている。しかし、システムが主体の自動運転では全く話が違ってくる。他の車両が間に割り込んできた時に人間ではなくシステムが瞬時に自動で判断・対応することが求められるからだ。
そこでは相手の動きを予測し、それによって停止するのか、車線を変更するのかなどを判断し、対応しなければならない。しかも、道路の状況など環境要因も大きく影響する。路肩のある道路なのか、複数の車線がある道路なのかでも対応は異なる。晴れて乾燥している路面なのか、雨が降って濡れている路面なのかで、ブレーキの効き具合も変わってくる。
「こうした問題をクリアするにはあらゆる場面を想定したテストをしなければなりません。それをどう実行するのかが大きな課題になっているのです」と宇野氏は語る。日本自動車工業会からはテストのガイドラインとして「自動運転の安全性評価のフレームワーク」が提示されているが、リアルな世界で実車を使って検証するには当然限界がある。
この限界を突破する手段として注目されるのが、コンピュータによるシミュレーションの活用だ。宇野氏は「リアルな世界では1秒は1秒で変わることはありません。しかし、コンピュータによるシミュレーションの世界では、処理能力によって1秒をいくらでも縮めることができます」とメリットを語る。
これまでも自動車の開発工程では様々なシミュレーションが行われ、そこではdSPACEのツールが活用されてきた。その同社が自動運転の機能開発に向けて新たに提供を開始したのが、MicrosoftクラウドコンピューティングプラットフォームAzure上でシミュレーションを実行できる「SIMPHERA」である。また同時に、リアルデータとバーチャルテスト環境を連携させる手法「データドリブン開発」と併せて自動運転アプリケーション開発のエンドトゥエンドソリューションを実現する。