本田技術研究所 先進技術研究所 知能化領域 エグゼクティブチーフエンジニアの安井裕司氏(撮影:酒井俊春)
本田技術研究所 先進技術研究所 知能化領域 エグゼクティブチーフエンジニアの安井裕司氏(撮影:酒井俊春)
本田技研工業の研究開発子会社、本田技術研究所(以下、ホンダ)が「乗り捨てできる自動走行車」を開発、2023年10月から茨城県常総市で実証実験に取り組んでいる。1人~数人で乗車でき時速20キロ未満で走行する「CiKoMa(サイコマ)」と、ペットのように歩行者の後ろをついてくるモビリティロボット「WaPOCHI(ワポチ)」だ。これら2つのマイクロモビリティはどのような仕組みで走行し、社会のどんな課題を解決するのか。本田技術研究所エグゼクティブチーフエンジニアの安井裕司氏に話を聞いた。
人間を完全に理解するサイコマ・ワポチ
──なぜ本田技術研究所は常総市でマイクロモビリティの実証実験を行っているのでしょうか。
 安井 裕司/本田技術研究所 先進技術研究所 知能化領域 エグゼクティブチーフエンジニア
安井 裕司/本田技術研究所 先進技術研究所 知能化領域 エグゼクティブチーフエンジニア1994年本田技術研究所に入社。適応制御、モデル予測制御、ニューラルネットワークを用いた低公害車やHEVのためのパワートレイン制御、F-1用トラクションコントロール、トランスミッション制御やデバイス制御の研究に従事。現在、協調人工知能CIや先進制御技術を用いた自動運転/運転支援システム・マイクロモビリティの研究領域におけるエグゼクティブチーフエンジニア。
安井裕司氏(以下敬称略) 2030年以降の世界で、「交通事故ゼロ」「ストレスフリー」「自由な移動の喜び」を一人ひとりが実感できる社会をつくるためです。
2030年に顕在化するであろう、モビリティの諸課題を整理しましょう。少子高齢化は深刻で、2030年には多くの高齢者が運転免許を手放す必要が出てくるでしょう。また、Z世代をはじめとした若年層は運転免許自体取得していない人も多く、全体的にクルマ離れが進むことが予想されます。
一方で、ECでの買い物のラストワンマイルの集配やタクシードライバー不足など、4km圏内の短距離の移動は今後ますます重要度が高まると予想されます。さらに、高齢者は都心に集まっていて、地下鉄の利用は階段の上り下りなどの観点から、身体に負担がかかります。病院などへの移動は「ドア・トゥ・ドア」で行うのが望ましいのです。
そうした中、「都市部で短距離移動の需要が高まるものの、供給手段がない」ことが世界中で問題になってきています。欧州で「乗り捨て」できる電動キックボードシェアリングが流行っているのもその証左でしょう。
こうした背景から、ホンダは独自のAI「協調人工知能(CI)」を搭載したマイクロモビリティで短距離の移動をスムーズに完結させるビジョンを描いているのです。
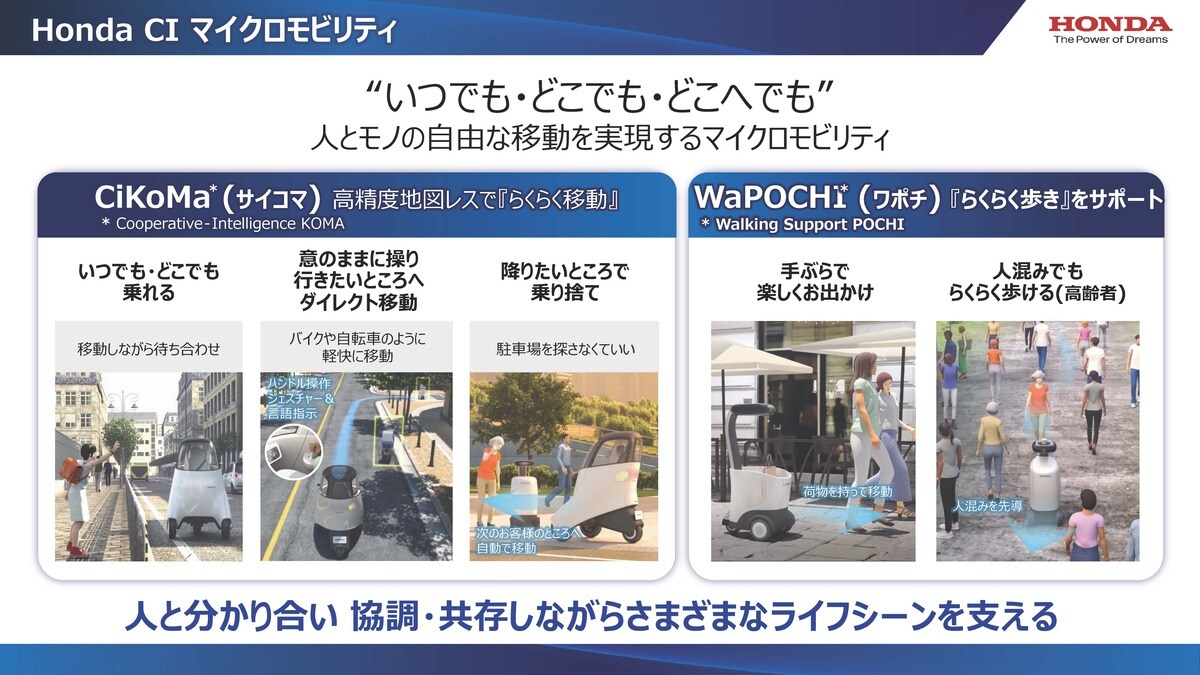
常総市内の実証実験エリアで稼働しているマイクロモビリティ「サイコマ」と「ワポチ」は、いずれも画像認識技術で自動走行する乗り物です。前者は1人〜数人を乗せて時速20キロ未満で移動、後者は荷物を乗せ、人間の歩くスピード(最速時速6キロ)に合わせて後ろをついてくるロボットです。サイコマ、ワポチともに、人間のジェスチャーを認識し、決められた目的地に向かうだけでなく、人のように道路を見て経路を決定する自動走行が可能です。
常総市の実証実験での最大の目的は、歩行者とクルマ、サイコマ、ワポチが事故なく安全に共生することです。2030年頃には公道でサイコマ、ワポチが問題なく走行できる状況を目指しています。
──「協調人工知能」は、通常のAIとは異なるのでしょうか。
安井 協調人工知能とは、周囲の環境を認識しながらヒトとコミュニケーションを取り、その意図や状況を理解した上で自ら判断できるホンダ独自の技術です。
自動車業界では自動運転の実現に向けてソフトウェア会社が研究開発に参入しています。ただ、自動車を制御することはそう簡単ではありません。というのは、AIの研究者は「学習→出力」の“学習”の部分にフォーカスするのですが、自動車の運転には膨大な学習量が必要で、すべての交通シーンを網羅できる保証がありません。結果として、開発コストが膨大になることもしばしばあります。さらに、自動車はテスト走行においても事故が絶対に許されないという性質上、「トライ&エラー」のハードルが、他のAI製品の研究開発より高いという事情もあります。
そこでホンダでは車体制御やパワートレインシステム、エンジン・装置系を専門とする研究者が加わり協調人工知能を開発しています。
サイコマ、ワポチともに、高精度地図に頼らずにカメラによる画像認識で自動走行を可能にしていますが、これが実現できたのも、車体の制御と効率的なエネルギーの伝達というこれまでホンダが積み上げてきたノウハウがあったからこそでした。