前回(「クルマが「自律的」に走るとき、自動車業界はどうなっているのか」)は、ITS(Intelligent Transport Systems)の現状と、今後、自動車業界と社会全体はどのような受け入れ態勢をつくらなければならないのかについて述べた。今回はITSの技術的課題について見ていく。
自動車という複雑な機械を操って、道路(ではない場所であっても踏破が可能であれば)を走ることを可能にする「多機能センサー」「認知判断を行い制御の内容を決めるプロセッサー」「機能操作アクチュエーター」が一体になった“人間”という制御システムは、一瞬の中で極めて複雑な作業を簡単にこなす。これを人工物で置き換えるのは非常に難しい。
しかしこの「人間という多能・制御システム」には弱点もある。1つは個々の能力や習熟度のレベルが様々であって、そのばらつきの幅が大きいこと。そしてもう1つは、時々ミスや機能低下を起こし、それがいつどのように起こるかを確かめたり、防いだりするのが難しいこと。
だから人工物による補助や置き換えによって、そのミスや機能劣化をカバーする、あるいは抑制することができれば・・・というのが、今、進められている「ドライバー補助システム」の開発と実用化の意味するところだ。
画像解析で車線を認識する「レーンキープアシスト」
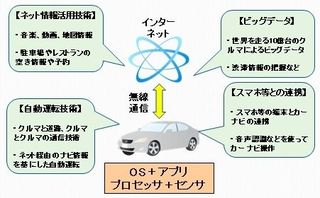
2013年秋のITS世界会議(東京)を期に公開され、現状を継続的に追ってこなかったメディアが先端技術だと話題にした「自動運転」の開発車両に実装されている技術のほとんどは、今すでに市販車に実装されている「ドライバー支援(補佐)システム」の個々の機能そのものか、ある程度まで高度化しつつ、判定と運転操作制御を自動化するシステムと組み合わせたものだ。
まず「道路」を認識する。これはまず画像処理によって「車線」がどこにあり、どう伸びているかを描くことが基本になっている。現状の市販車にも「レーン逸脱警告」や、さらにそこにパワーアシスト機構を逆に使って操舵動作を加える「レーンキープアシスト」が組み込まれるようになっていて、これらも画像解析による車線認識を使っているが、現状では「車線の中央」を、つまり「車両を挟んだ左右のレーンマーク(白線)から等距離になる位置」を保って走る、という制御ロジックのものばかりである。
しかし現実の路面には様々な凹凸や傾斜があり、タイヤがそれを踏むことでクルマの進路は常に変動している。それを「この方向に進ませる」とイメージして舵をゆるやかに、連続的に保持することを、少し慣れたドライバーならば自然に身につけている。