このコンテンツの続きは
無料会員の方のみご覧いただけます
無料会員の方のみご覧いただけます
登録済みの方は
会員なら
仕事に役立つ記事・動画が
無料で読み放題・見放題!
仕事に役立つ記事・動画が
無料で読み放題・見放題!
会員登録をすると
他にもこんな記事/動画が見られます
他にもこんな記事/動画が見られます

成果が見込めなければ「きっぱり撤退」 TOPPAN黒部CFOが語る「ROE8%超え」の挑戦と長期志向の財務戦略
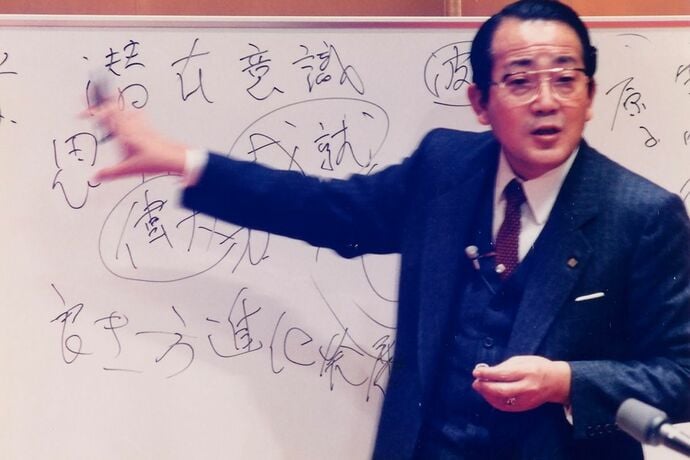
「何部売れたら元が取れる?」 稲盛和夫の「高邁さ」と「ソロバン勘定」、松下幸之助が推薦した初の著書の誕生秘話

中途入社の技術者が「天国だな」…「数十億円の稟議書」を即決する日亜化学の驚きの判断基準とは

ジョンソン・エンド・ジョンソンCEOが管理職358人を評価、「有望」グループのリーダーが備える世界共通の特徴とは?
会員6大特典
全記事・動画
見放題
見放題
フォロー機能
クリップ機能
記事の印刷・ダウンロード
シークレットコンテンツや限定イベント
最新
セミナー情報
セミナー情報
無料会員特典
Japan Innovation Review会員にご登録頂くと、
以下すべての機能を
すべて無料でご利用いただけます。
以下すべての機能を
すべて無料でご利用いただけます。

すべての記事・動画が見放題
無料メールマガジンも毎日届く
無料メールマガジンも毎日届く
変革リーダー必見の記事・動画がすべて無料で閲覧可能。無料のメールマガジン (平日毎日配信)で新着コンテンツを欠かさずチェックできます。
業界、特集、シリーズ/連載、企業等 すべてのコンテンツ、キーワードが
フォロー可能。
気になる情報を見逃さない
フォロー可能。
気になる情報を見逃さない
業界、特集、シリーズ、連載、企業など、気になる情報をフォローすると、 マイページで該当コンテンツの新着を確認できます。
クリップ機能で
「あとで読みたい、見たい」が簡単に
「あとで読みたい、見たい」が簡単に
「あとで読みたい、見たい」記事・動画はクリップ(保存)してマイページ内でチェックすることができます。

記事の印刷・PDFダウンロード
情報のストックや共有に活用
情報のストックや共有に活用
複数ページにまたがる記事をPDFファイルで一括ダウンロードすることができます。印刷する際にも便利です。 ※私的利用に限ります

会員限定のシークレットコンテンツや 特別イベント
会員限定のシークレットコンテンツの閲覧や、特別イベントにご参加いただけます。

豪華講師陣登壇の
最新セミナー情報が受け取れる
最新セミナー情報が受け取れる
年間80本以上開催の豪華講師陣によるDX/企業変革無料セミナーの情報を、 漏らさず入手していただくことができます。
JBpress/Japan Innovation Review主催セミナー
DXフォーラム
リテールDXフォーラム
マーケティング&セールス
イノベーションフォーラム
CXフォーラム
人的資本フォーラム
ワークスタイル改革フォーラム
採用改革フォーラム
DX人材フォーラム
ファイナンス・イノベーション
金融DXフォーラム
ものづくりイノベーション
建設DXフォーラム
物流イノベーション・フォーラム
モビリティ未来フォーラム
公共DXフォーラム
不動産DXフォーラム
取締役イノベーション
経営企画イノベーション
戦略人事フォーラム
戦略総務フォーラム
法務・知財DXフォーラム
サイバーセキュリティフォーラム
ほか
登録済みの方は