「事故を起こさない」車の開発は
車両運動の正しい理解から
車両運動の正しい理解から

「アダプティブクルーズコントロール(ACC)」の作動イメージ。目標(到達上限)速度をドライバーが設定しておくと、直前を走る車両の存在を検出し(このボルボのシステムの場合は電波レーダーと単眼カメラの組み合わせで)、車間距離(実際には車間時間の方が適切。これも長短の設定でできるものがほとんど)を維持するように自車の速度を調節しつつ走り続ける。最近は自動ブレーキシステムとも組み合わせて、このように渋滞の中でも前走車に追随して減速、停止する機能を持つものも増えてきた。停止後の発進にはドライバーの指示操作が必要なようになっているが、そこからの加速、車速維持も自動的に行える。(図版:Volvo Car Group)
(画像1/5)

最新の市販車に実装されている衝突抑止・警告などのドライバー支援システムのイメージ。高速道路や郊外路などを巡航している中で、前走車の存在とお互いの速度、距離の関係を検出、必要ならば自動ブレーキも行う。ドライバーにとって死角になりやすい斜め後方についても、並走している車両(この場合はモーターサイクル)を検出して、車線変更を行わないように警告、ステアリングを切るのを抑えるような制御を加えるものも現れている。(図版:Volvo Car Group)
(画像2/5)

最新の市販車に実装されている衝突抑止・警告などのドライバー支援のうち、速度が比較的低く、歩行者や駐車車両も存在する市街地で機能するシステムのイメージ。この状況に入ってきた車両(中央後方)は、前方を走る車両を検出、お互いの動きを追うのはもちろん、そこここに立ち、歩いている人間の存在、さらに駐車状態からバックで出ようとするクルマの動きまで識別、警告や回避(ブレーキ)を行う。駐車車両の側も、前後の状況を監視して危険があれば動かないように警告、発進抑止を行う。(図版:Volvo Car Group)
(画像3/5)
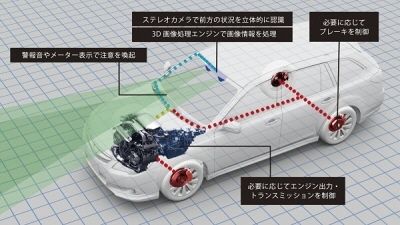
富士重工業(スバル)は、フロントウィンドウの上部に離れて設置した動画撮影カメラで前方の状況を撮影し、画像処理によって前走車両や障害物、歩行者などを識別、視差(見えている角度の差)から距離を計算する、という「ステレオカメラ」によって、アダプティブクルーズコントロールや緊急時自動ブレーキを行う。電波やレーザーによって物体を検出し、カメラの映像で認知を行う手法が主流である中で独自のアプローチ。次期仕様はカメラをこれまでのモノクロからカラーに変え、赤信号やブレーキランプの判別精度を上げる。ドライバーの視点から働き方を「チューニング」できるスタッフがいることも、日本のITS開発の中では一日の長がある。(図版:富士重工業)
(画像4/5)

現在、日本の各社が開発している「自動運転」は、「前方障害物」を検出した時にブレーキで衝突回避、もしくは被害軽減を図る市販システムから一歩進んで、「操舵による回避」を加える方向に進んでいる。しかし「並走する車両がいれば車線変更を行わない」(写真参照)という程度の制御とその確認にとどまり、自車の全周の状況を刻々と把握して、最適の、つまり自車だけでなく周囲の車両や人に被害が及ばない、それが避けられなければ最悪の被害(まずは人身の傷害発生)を抑制するための回避行動を組み立てる、といったところに踏み込んではいない。また、こうした回避運動では、単純な車線変更であってもタイヤと路面の摩擦の限界に踏み込み、車両が複雑な挙動を起こす可能性が高い。もし開発者が、それは現状のESC(Electronic Skid Control: 横滑り抑止システム)を働かせればいいと考えているのであれば、その作動では車両の運動軌跡まではコントロールできず、タイヤの滑りに応じて最適の挙動制御を行う必要があることを理解しなければならない。(写真:トヨタ自動車)
(画像5/5)





「事故を起こさない」車の開発は
車両運動の正しい理解から
車両運動の正しい理解から
この写真の記事を読む